Farmers have acres of fields to look after, and it can be hard to spot an insect infestation before crops endure significant damage. What if a robot could help? That’s a question Computer Science Professor Gary Holness and students are tackling in Clark’s robotics lab, the Laboratory for Intelligent Perceptual Systems.
Farms provide an interesting setting for machine learning
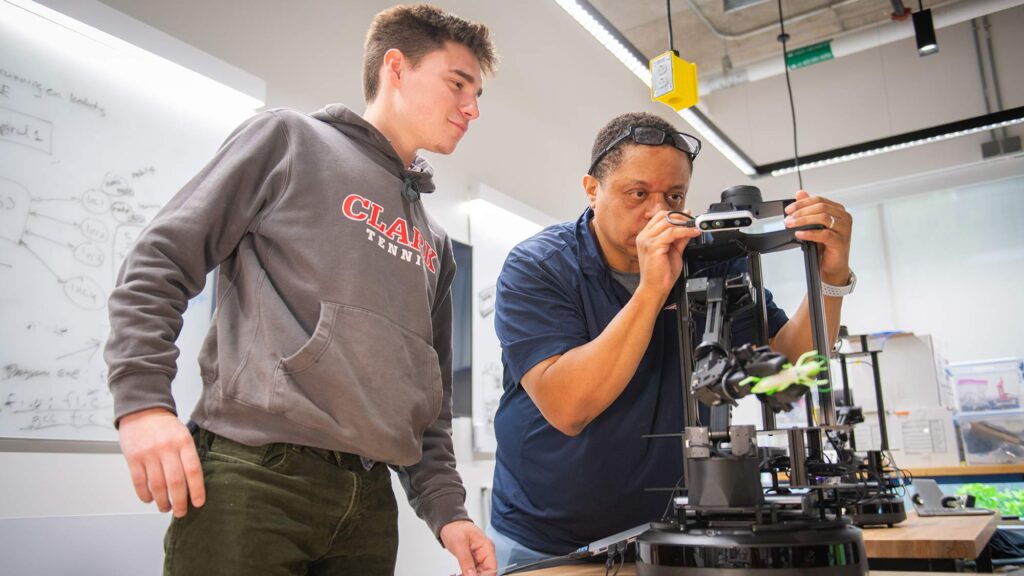
Holness, Adrian Ramirez ’25, and Richard Geli, M.A. ’25, are working on an experimental prototype consisting of a team of four mobile robots networked together to model collaborative foraging in fields scanning for pests.
Having spent countless hours designing and building the system from scratch in the lab in Clark’s Center for Media Arts, Computing, and Design, Holness is building an experimental prototype in which to expand upon the research and test out various ideas. Farms, he says, provide an interesting setting for machine learning, his area of expertise.
“A robot operates quite successfully in a structured environment like a factory floor or even semi-structured environments such as a warehouse where much is controlled but some aspects involve uncertainty,” Holness says. “Structure means that everything is engineered specifically.”
A farm does not provide strict structure, as terrain varies, crops occur in various shapes and sizes growing at different paces, and it abounds in the activity of laborers, equipment, and animals. “A field is unstructured, so it’s a challenging environment,” he adds. “There are a lot of pressing needs specifically for digital farm management.”
The robots will focus on surveying fields using an information-driven probabilistic algorithm, video cameras, specialized sensors, and laser scanning to identify areas exhibiting indicators of crop damage within the local environment. This mechanism could help farmers locate and map areas with pest infestations.